 |
| Hexapodo |
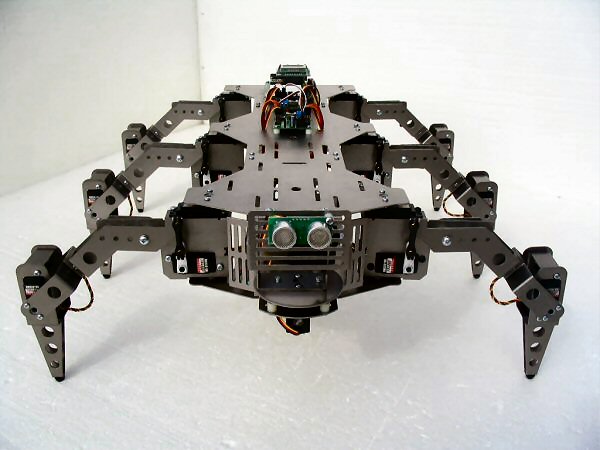
HEXAPODO
METODOLOGÍA
a. Recopilación de información y estudios previos
- Consultar información relacionada con trabajos teóricos realizados sobre el tema
- Consultar información de robots hechos sobre el tema
- Consultar de estructuras mecánicas para implementaren nuestro proyecto
- Consulta del funcionamiento del servomotor
b. Diseño del modelo mecánico y electrónico
- Elección de materiales adecuados para la construcción.
- Mediciones previas de los componentes del robot
- Realizar varios esquemas generales, en papel, de la estructura mecánica del robot
- Diseñar el plano electrónico, en papel, del robot
c. Construcción del algoritmo
- Consultar información sobre el lenguaje de programación a usar.
- Realizar algoritmos previos de ensayo generales para manipulación del software
- Realizar algoritmos de prueba manipulando directamente los servomotores
- Creación de varios algoritmos para la movilidad del robot
- Simulación de algoritmos de movilidad
d. Construcción de la plataforma mecánica y electrónica
- Obtención de los elementos de construcción
- Intervención de terceros para el corte y manufactura de las estructuras del robot.
- Construcción de los circuitos necesarios para el ensamble
- Ensamblado de las piezas
e. Realización de pruebas
- Implementación de los diversos algoritmos en la estructura total del robot
- Pruebas de campo
- Culminación de la plataforma
f. Presentación de resultados finales
- Realización del informe final
- Presentación de la plataforma móvil.
PLAN DE TRABAJO
CRONOGRAMA
ACTIVIDADES
|
MES I
|
MES II
|
MES III
|
MES IV
|
MES V
|
MES VI
| |||||||||||||||||
01
|
02
|
03
|
04
|
05
|
06
|
07
|
08
|
09
|
10
|
11
|
12
|
13
|
14
|
15
|
16
|
17
|
18
|
19
|
20
|
21
|
22
|
23
| |
Recopilación de información y estudios previos.
| |||||||||||||||||||||||
Diseño del modelo mecánico y electrónico
| |||||||||||||||||||||||
Construcción del algoritmo
| |||||||||||||||||||||||
Construcción de la plataforma mecánica y electrónica
| |||||||||||||||||||||||
Realización de pruebas.
| |||||||||||||||||||||||
Presentación de resultados finales.
| |||||||||||||||||||||||
No hay comentarios.:
Publicar un comentario